什么是广度优先搜索?
广度优先搜索(又称宽度优先搜索)算法的核心思想是:初始化,生成第一层结点,检查目标结点是否在这些第一层结点中,若没有,再将所有第一层的结点逐一扩展(即其后继结点),得到第二层结点,并逐一检查第二层结点中是否包含目标结点。若没有,再逐一扩展第二层的所有结点……,如此依次扩展,检查下去,直到发现目标结点为止。即:
从图中的某一顶点 开始,先访问 ;
访问所有与 相邻接的顶点 ,,......,;
- 依次访问与 ,,......, 相邻接的所有未曾访问过的顶点;
- 循此以往,直至所有的顶点都被访问过为止。
这种搜索的次序体现沿层次向横向扩展的趋势,所以称之为广度优先搜索。
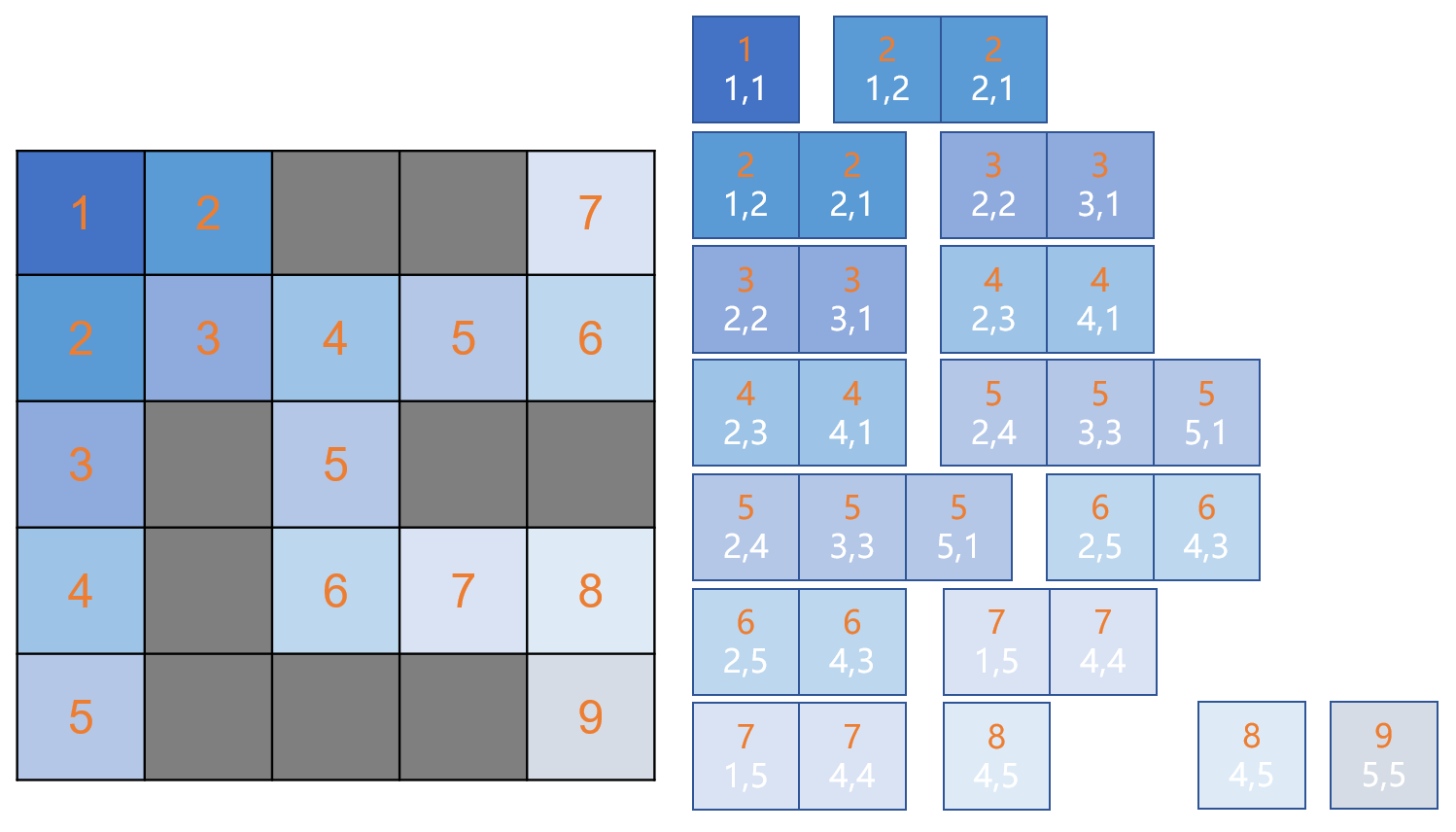
灰色格子表示墙,不可以走;其它颜色格子可以走。
图的广度优先遍历
题目描述
读入一个用邻接矩阵存储的无向图,输出它的广度优先遍历序列。
输入格式
第1行1个正整数n,表示图中顶点数,2≤n≤100;
接下来的n行是一个n×n的邻接矩阵,a[i][j]=1表示顶点i和顶点j之间有直接边相连,a[i][j]=0表示没有直接边相连。保证i=j时,a[i][j]=0,并且a[i][j]=a[j][i]。
输出格式
输出1~n的某一种排列,表示从顶点1开始,对该图进行宽度优先遍历得到的顶点序列,每两个数之间用一个“-”分隔。
样例
8
0 1 1 0 0 0 0 0
1 0 0 1 1 0 0 0
1 0 0 0 0 0 1 1
0 1 0 0 0 1 0 0
0 1 0 0 0 1 0 0
0 0 0 1 1 0 0 0
0 0 1 0 0 0 0 1
0 0 1 0 0 0 1 0
1-2-3-4-5-7-8-6
提示

参考程序:数组模拟队列
#include <iostream>
#include <cstdio>
using namespace std;
const int N = 105;
int n;
int g[N][N];
int q[N];
bool book[N];
bool is_first = true;
void bfs(){
int hh = 0, tt = -1;
q[++tt] = 1;
book[1] = true;
while(hh <= tt){
int t = q[hh++];
if(is_first){
cout << t;
is_first = false;
}
else
cout << "-" << t;
for(int i = 1; i <= n; i++){
if(g[t][i] && !book[i]){
q[++tt] = i;
book[i] = true;
}
}
}
}
int main() {
cin >> n;
for(int i = 1; i <= n; i++)
for(int j = 1; j <= n; j++)
cin >> g[i][j];
bfs();
return 0;
}